Image Description, by Stephane Redon

These images are three snapshots demonstrating our new interactive continuous collision detection method for avatars in virtual environments, which might be useful in games. For realistic interaction in virtual environments, it is often necessary to try and avoid interpenetration between the avatar and the obstacles. This is a difficult problem however when some parts of the avatar or the obstacles are thin, or when the avatar is moving fast. In multiplayer games, for example, when your avatar is hiding behind a wall, you don?t want some parts of him penetrating through the wall and being visible to the enemies. To help solve this problem, bounding volumes which enclose tightly the avatar -and its trajectory- can be used. We have proposed to use dynamically built swept volumes of Line Swept Spheres (LSS) and use the occlusion queries methods of recent graphics cards to perform continuous collision detection on these bounding volumes. Basically, each link is enclosed in a rigid LSS. At runtime, the swept volume of the LSS is computed and checked for penetration with the environment. More than one LSS per link can be used if needed.
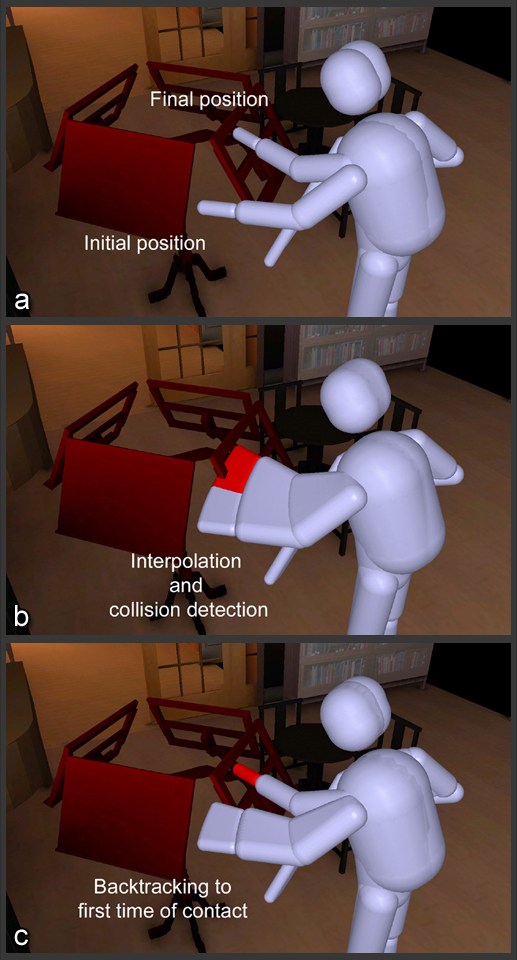
Part A of the image shows the initial and final position of the avatar for the current timestep.
Part B shows the interpolation used to perform the collision detection. Some slices of the swept LSS are invalid because they are penetrating the environment.
Part C shows the valid part of the trajectory.
The method is described in the paper :
Interactive and Continuous Collision Detection for Avatars in Virtual Environments.
Stephane Redon, Young J. Kim, Ming C. Lin, Dinesh Manocha and Jim Templeman.
To Appear in Proceedings of IEEE International Conference on Virtual Reality, 2004.
A video, other images and the corresponding tech report are available at : http://cs.unc.edu/~redon.
Cheers,
Stephane Redon
|
|

