 |

Submitted by , posted on 26 March 2001
|
 |
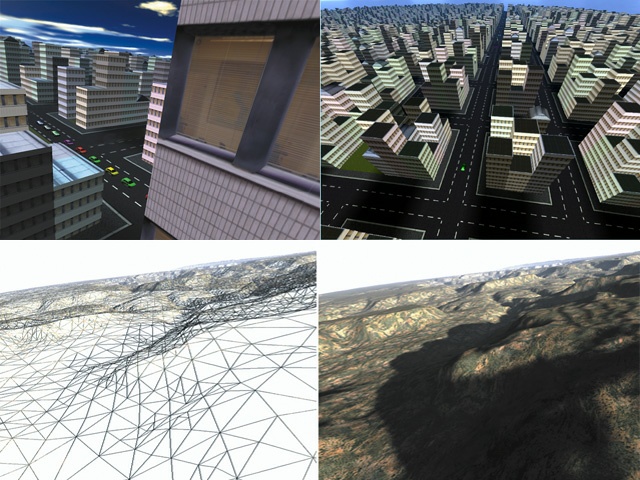
Image Description, by

We've been pretty busy recently writing new demo material for Umbra, our
visibility determination system for dynamic environments. Above are shots
from two of the demos; the top row displaying an urban scene with 16,000
buildings and 4,000 moving cars (and a rather hacked traffic light system).
The bottom row contains shots of Grand Canyon -- we wanted to see how well
generic occlusion culling algorithms work with terrains. The terrain is by
no means static; one
can pick up pieces of it with a mouse and see how the changed geometry
affects the visible set of the terrain.
More images, these and other demos, the new 500-page manual of the system,
API headers etc. can all be downloaded from http://surrender3d.com/umbra .
cheers,
-wili
|
|