 |

Submitted by , posted on 10 September 2003
|
 |
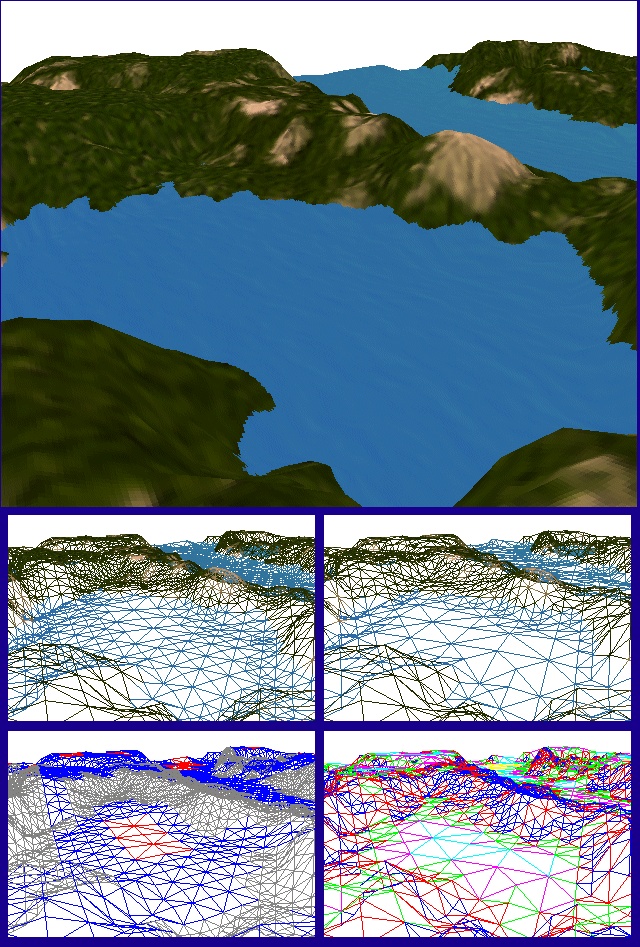
Image Description, by

I think anyone who is really into 3D graphics programming has made a basic
terrain engine at some point, so I wanted to do something a little different.
For my 4th year honours project at Carleton University I did a research paper
(with implementation) comparing different Terrain Level of Detail techniques.
The algorithms I compared are the R—ttger, ROAM and Lindstrom algorithms, and
the comparison was based on an evaluation of polygon counts versus terrain
accuracy. Granted, this is more of a GIS point of view since most game
developers won't give a rat's elbow whether or not their terrain is 100%
accurate as long as it is fast and uses minimal memory...but like I said, I
wanted to do something different.
The paper is available on my site, as well as the source code of the
implementations (which make use of an engine I created called the DK
Engine). Click here
to go directly to the Terrain Level of Detail project, or browse my entire
site here.
Derek Bradley
|
|